"��������������ƽ��˹���֧�ֽ�����ҵ"
SBRBC-02��ҵ�����˻���Betway�������� (ABB������ϵͳ)
��
һ����ҵ�����˻���Betway�������� ������
�ҹ�˾������м����У������з���ϵ�л�����ʵѵװ�ã���ҵ������Ӧ����ά��ʵѵ����ϵͳ�豸����ϵͳ����"�ĸ���λ"����ְҵ���ܾ����Ķ�λ��������ѵ������Ķ�λ����ѧ��һ�廯��ѧ�ĸ�Ķ�λ�����ϸ����˲���ѵ���صĶ�λ��
���豸���ڻ���������ѵӦ���豸����6�������Ϊ���ģ���������Ҫ�����ò�ͬ�������壬����ѧ���Ի����˻���֪ʶ����֪������ģ�͵Ŀ���������Ȥζ���������ԣ���������ѧԱ��ѧϰ��Ȥ��ͨ�����ϵ��ظ�ѵ����ǿ��ѧԱ�Ի����ĵ�ʾ�̡�ֱ�ߡ����ߵ��˶��㼣���˽������գ�ѧϰ��ȷ��Ķ�λ���������˶�·��ѡ���Ż���ʹѧ���Ի�����Ӧ�ü����г����˽������ա�
���豸�����������ģ�黯��ƣ��߱������ԡ������ԡ�����ֲ�Ե��ص㣻��Ԥ������չ�������Ľӿڣ������г�������в��ϵĿ�����������ѧУ�û����д�������µĹ���ģ�顣
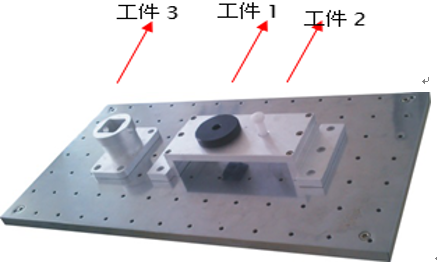
������ҵ�����˻�������վBetway�������� ͼƬ��


��ͼƬ�����ο�����ʵ������Ϊ��

��ͼ����ģ����װ�����ģ��

����Ϳ��װ�����ģ�����������ģ��

ͼ����˲���ģ�ͼ�����в���ģ��
��������������
1��������Դ����������220V��5%��50HZ
��ȫ������©�籣����������������·����
2������ʣ���2KW
3�������¶ȣ�-10��50��
4������¶ȣ���85%
5�����γߴ磺L2300mm��W2800mm��H1200mm
�ġ���Ʒ�ṹ��
���豸��Ҫ�����Ṥҵ�����˼�������ʵѵƽ̨���������ư塢�켣ѵ��ģ�͡�����װ��ģ�͡��������ģ�͡�����Ϳ��װ��ģ�͡�������ģ�͡�ͼ�����ģ�͡����ϴ洢�䡢��������ǽ����ȫ����������˫���̼оߡ�������ͼ�ʼоߡ������������̼оߡ�����ץ�����̼о��IJİ���ɡ�
���Ṥҵ�����˼������������˲���ʵ�ʹ�ҵӦ�õ�ABB������IRB120-3/0.58����Ч����3kg����չ0.58�ף�����ҵ�����Ϳ��������������˿���������������20mm��ְ庸�Ӷ��ɣ�������á�
�Ӿ�ϵͳ����ҵ��ר���Ӿ���������������ר�������ܺڰ�������ܼ��������״�������������ù�Դ�ȡ�
ʵѵƽ̨��ƽ̨֧�Ű����2mm��ֲľ�����е�ӹ�������ͣ�������Ϳ������̨�����520��266��15mm��ְ�ӹ����ɣ�����Ƹ����������40��40mm��M4����ͨ�ף����ڰ�װ��ͬ����ģ�ͣ�����һ�లװ�����ӿںУ��ṩһ����ͣ��ť���ڽ��������ʹ�ã�6λ��ѹʽ���ӣ�ʹ��������ģ��ѵ��������/������ߣ������ݣ�һ·��·����ڼ���ѹ���ڿ��ƣ��ɶ�ѵ���ṩ��Ҫ����Դ��
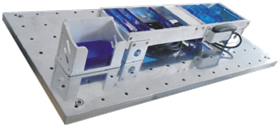
�������ư壺������������л����������ò�����۲죬����350��400mm�����������������鼮�ڷŵ����Ի���ƣ�����Ҳ��ְ�ʴ�̴�������װ�ж�·�����ڶ��豸��Դ�Ŀ��ƣ���ͣ��ť��Ӧ����������ķ�����ת�����ؿɶ��ֶ����Զ�֮���л�����Դ��ť�ɿ����豸��ͣ��·��16��ť�ӿ��������ֶ�״̬�Ի�����IO����Ŀ��ƣ�16��LEDָʾ����ʾ����������״̬���������װ岻��ְѼӹ����ɣ����ڰ�װ�̵��������ص�Դ�ȵ���Ԫ�����������ư�ϵͳͨ���ּܽṹ��װ�ڰ�ȫ�����Ŀ���ϣ���ظ߶�1�����ң��������������
�켣ѵ��ģ�ͣ�����ּӹ����죬ͨ����ƽ�桢������ʴ�̲�ͬͼ�ι����ͼ����ֱ�ߡ�Բ�Ρ������Ρ�����������ε����������Ա��λ�ͼ�о����ͼ�Σ�ѵ���Ի����˻����ĵ�ʾ�̣�ֱ�ߡ������˶��㼣�����գ�
����װ��ģ�ͣ���һ���̶��ڲ���̨����Ϊ"���幤��"��������ͨ��ץ�ֻ�����ʰȡ"װ�乤��"����"װ�乤��"��ȷװ�䵽"���幤��"�ڣ����������ͨ��ץ�ֻ�����ʰȡ"��������"����"��������"�������´���"���幤��"��"װ�乤��"����Ӳ��洩��"���幤��"��"װ�乤��"�ڣ�"װ�乤��"װ�䵽"���幤��"���ô��϶���װ�䣬"��������"װ�������ַ�ʽ�����Դ������£�Ҳ���ԴӲ��洩�룻ѵ���Ի����˾�ȷ��λ��ץ�����̼оߵ�ѧϰ��
�������ģ�ͣ�����������ԭʼ����ڴ洢���ڣ����������������ƣ��ڷ�װ�ò��ó��߲��룬��Ϊ�������������̨�й��˴�������ⲣ����ij��ߣ�������ͨ�����̼о�ʰȡ�����嵽���̨��⣬���ݼ���жϲ�������ѡ����뷽������ѭ�������̼о�����ʰȡ�������������壻ѵ���Ի������в�ͬ���ѡ��ľ�ȷ��λӦ�ü���
����Ϳ��װ��ģ�ͣ�Ϳ����������ģ�͡�����������ֱ�̶�������̨�ϣ�������ͨ�����̼о�ʰȡ��������������������������ʰȡ��������Ϳ������ɺ�ѳ���װ�䵽�����ϣ�����ʰȡ�ڶ��鳵�����������ǰ�����촰����ʰȡ��Ϳ����װ��������ϰ�Ի����˵��ʾ�̡��������˶��켣ѡ����Ϳ��������ϡ�
������ģ�ͣ����ļӹ����������ϰڷŵװ�����װ�̶�������̨������Ҫ�����Ͽ鱻�ڷŵ��ڷŵװ��ϣ�������ͨ�����̼о߰�Ҫ��ʰȡ���Ͽ��������������Ͽ��г����κ����������֣������߿ɸ�����Ҫѡ��ڷţ��ɸ�����Ҫ�����������������״�� ��ϰ�Ի�������⡢���е����Ⲣ���ٱ��ʾ�̵�Ӧ�ü��ܡ�
ͼ�����ģ�ͣ�����״���ϰ��ˣ�������ͨ�����̼о����ΰ�һ�����ϰ�ڷźõĶ�����״���ϣ����Ρ�Բ�Ρ�����Ρ������Ρ�����ǣ�ʰȡ���˵���һ�����ϰ��ϣ�Բ�����ϰ��ˣ�������ͨ�����̼о����ΰ�һ�����ϰ�ڷźõ�����ʰȡ���˵���һ�����ϰ��ϣ����ϰ����ˮƽ�̶�������̨��Ҳ����бһ��ǶȰ�װ������̨��Բ�����������֣�һ�ֽ���Ǯ�������ϣ�һ�ֵ��������ϣ�ÿ�����ϰ��Ӧ��λ��ʴ�������ϱ�ţ�������ʽ�ɸ���Ҫ�������ϣ���ʽ������������ƽ�桢б�桢���С�ָ�����λ�á��������ϻ�ϵ�Ҫ��ǿ���Ի����˵�λʾ�̼�����ѵ����
���ϴ洢�䣺�ߴ磺700 mm��350 mm��450mm���ڲ��ֲ�洢������ÿ���ж������ּ�֧���������ɷ�3�㣬�ڳIJ��ú����ϣ���Ǻ��ڲ�������ABS���ϣ�ģ��һ�γ��Σ�������֮��ɲ���������������һ�壻�����ÿ�����20kg�������������ÿɳ�60kg�������ⲿ�ɳ�130kg��
��������ǽ��2.0mm���ʺ�������������ɣ��̶ܹ���ǽ���ϣ���10�������λ�ã�ÿ������λ�ô��ж���Ŀ�ӻ�������ʶ�����ڴ�Ÿ��ֹ�����˿��ĸ�����������ֱ�ۣ���ŷ��㣬���ڰ��ˣ�ռ�ÿռ�С���ǹ�������洢���ܵ��������塣
��ȫ���������뻤������1000mm����ܲ���2mm���ɫ�������Ͻ��Ͳģ��ֻ�����10mm����վȫ��ͨ���ڹ۲죬�����м�û�и��ϣ�����װһ����ţ����ϰ�װ��ȫ���Ԫ�����������Զ����б������Źر�״̬�½��У�ϵͳ����վ��װ��3����ͣ��ť���ֱ�λ�ڲ�������̨��ģ�Ͱ�װ̨�����뻤���ϣ��Ա��������ʹ�á�
������ͼ�ʼоߣ����ļӹ������������ʸ��ڿգ���װ���о���л��ơ�
����˫���̼оߣ����ļӹ����������������㲣���塢���Ͽ飨Բ�Ρ����Ρ�����ǡ�����Ρ������Ρ����������Ρ����������ϵȶ������ϵ�ʰȡ�������������о�ͨ�á�
�����������̼оߣ����ļӹ���������������������ģ�Ͳ������������塢���Ͽ飨Բ�Ρ����Ρ�����ǡ�����Ρ������Ρ��������������ϵȶ������ϵ�ʰȡ�������������о�ͨ�á�
����ץ�����̼оߣ����ļӹ���������������ץ�����������ֹ��ܣ��ܶԶ������Ͻ��д�����ѧԱ�ɸ���Ҫ��ѡ��һ�ַ�ʽ�����ַ�ʽͬʱʹ�ã������ѧ�����Լ�����ѡ���ԡ�
�塢��Ʒ�ص㣺
1.����ʽ��ƣ��ɸ���ʵѵ����ѡ�������ʹ�üо�����ģ�ͣ�������ѧԱ��Ըѡ����ʵѵƽ̨�İ�װλ�ü������Ҿ��кܺõ������ͣ��ͻ��ɸ����Լ���������ģ�ͼ��оߡ�
2.ģ�����ã�����ģ�ͼ��о�ȫ��װ��һ�ο�ģ���������ϴ洢���ڣ�ʹ�ñ��淽���ݣ���Լ�ռ䣬���ڹ�����
������ҵ�����˻���Betway�������� ���ü�����
|
��� |
���� |
���ܼ��������� |
���� |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 |
����̨ |
���ܡ��������ص����� |
1��8·�������Ƶ�Դ�ṩ�豸������̨���磬���й�������·�ȱ������ܣ�����̨�����ñ�Ĥ�������գ�������ȫ���㣻2��������ͶӰ��Ļ���������÷�·���ƣ��߱��������ƹ��ܣ��ŷ���������������ڲ���̨���ݣ� 3����Ƶ����ϵͳ�䱸�����������ͷ��������Ӳ��¼�����ȫ���ؽ��ҵĵ�ǰ״̬�� 4����Ƶչʾ̨�۵�ʽ��ţ��ڲ�ռ���ⲿ�ռ��ǰ����Ϊ��ѧ����ʾ�ṩ���㣻 5����װ���������ļ����ϵͳ��Ͷ�ý�����ϵͳ����������ֽ�ѧ��������̨���õij��õ�USB2.0��2������VGA���Ľ�һ������ܽӿ�Ϊ��ѧ�ṩ�˱�ݣ� 6������̨���Ժ�ѧ�����������ϵͳ�����ڽ�ѧ������Ҳ�ɽ�����������ʵ��Զ�̼�ز����Ĺ���Ŀ�ģ� 7���ߴ磺2800mm��1200mm��1100mm (����������) |
1�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
������ϵͳ |
���ܡ��������ص����� |
1��ABB������IRB120-3/0.58����Ч����3kg����չ0.58�ף�����ҵ�����Ϳ��������������˿��������� 2��������20mm��ְ庸�Ӷ��ɣ� 3��������220V��Դ�����嵽������3��7m�����£� 4��ʾ���������IJ������棬���嵽ʾ����3��7m�����£� 5����DC24V 16in/16out IO���� 6�������Ӿ��������ϵͳ 7��Զ�̻�����ϵͳ������ָ����ܣ� 8�������Զ������������غɼ���趨���ܣ� 9���ڻ�����ʹ�������ڣ�ʹ�û�����������������ʵʱ����IO��������3D��̬������أ� 10�����л�����ȫ���������Զ�ά�����ϵͳ���ܣ� 11�����е�ص���������ʡ���ܣ� 12�������˿���ϵͳԭ���̬�洢������1G����֧��USB��չΪ���洢���� 13�����л������˶��켣ʵʱ�����ܣ� 14���ṩ����������ϵͳ���������� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 |
��������ϵͳ�� |
���ܡ��������ص����� |
1��������������л����������ڹ۲죬���в�С��350mm��300mm�Ŀհ��������ڴ�����ϣ� 2�������������ɽ��е�Դ���ƣ���©�翪�ء���ͣ��ť���ֶ�/�Զ�ת�����ء�ť�ӿ��ء�LEDָʾ�ƣ���©�籣������������������ֹͣ�ȱ������ܣ� 3��16��ť�ӿ��������ֶ�������������������ź����ӣ������ֶ����ƻ��������У� 4��16��LED�������������ź����ӣ�ֱ��ָʾ�������������״̬�� 5���ڲ���װ���ABB�̵������ڻ������ֶ��Զ��л��ȹ��ܣ����ص�ԴΪ�豸�����ṩ��Ҫ�Ŀ��Ƶ�Դ�� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
4 |
�����������ƽ̨ |
���ܡ��������ص����� |
1������֧�żܣ�������ƣ����ڵ���̶���̨�氲װģ�ͣ� 2������̨��װ壬���12mm��������t����������40��40mm���� M4���ư�װ�ף����ο���װ���ֹ������� 3����������ӿںУ�1·��·���ƽӿڡ�1����ͣ��ť��1��ģ���źŽӿڡ� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
5 |
��ͼ�ʼо� |
���ܡ��������ص����� |
���ļӹ������������ʸ��ڿգ���װ���о���л��ƣ��ɰ�װ���������ϣ����ڹ켣ѵ��ģ�ͼо�ʹ�á� |
9�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 |
ץ�����̼о� |
���ܡ��������ص����� |
���ļӹ���������������ץ�����������ֹ��ܣ��ܶ�3�����Ͻ��д�����ѧԱ�ɸ���Ҫ��ѡ��һ�ַ�ʽ�����ַ�ʽͬʱʹ�ã������ѧ�����Լ�����ѡ���ԡ� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
7 |
˫���̼о� |
���ܡ��������ص����� |
���ļӹ����������������㲣���塢��Բ�Ρ����Ρ�����ǡ�����Ρ������Ρ������Ͽ顢�������ϵȶ������ϵ���ȡ�������������о�ͨ�ã� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
8 |
��ͼ�������� |
���ܡ��������ص����� |
����ּӹ����죬ͨ����ƽ�桢������ʴ�̲�ͬͼ�ι����ͼ�����Ա��λ�ͼ�о����ͼ�Σ�ѵ���Ի����˻����ĵ�ʾ�̣�ֱ�ߡ������˶��㼣�����գ�ѧϰ��Ķ�λ���������˶�·��ѡ���Ż��� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
9 |
����װ��������� |
���ܡ��������ص����� |
1����һ���̶��ڲ���̨����Ϊ���塰����3���� 2��������ͨ��ץ�ֻ�����ʰȡ������1�����ѡ�����1����ȷװ�䵽���塰����3���ڣ� 3��������ͨ��ץ�ֻ�����ʰȡ������2�����ѡ�����2���������´��롰����1���͡�����3������Ӳ��洩�롰����1���͡�����3���ڣ� 4��������1��װ�䵽������3�����ô��϶���װ�䣬������2��װ�������ַ�ʽ�����Դ������£�Ҳ���ԴӲ��洩�룻 5��ѵ���Ի����˾�ȷ��λ��ץ�����̼оߵ�ѧϰ�� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
10 |
����Ϳ��װ��������� |
���ܡ��������ص����� |
1��Ϳ�������̶�����ģ�͡�����������ֱ�̶�������̨�ϣ� 2��������ͨ�����̼оߵ�����������ʰȡ������������ʰȡ������Ϳ��������Ϳ������ɺ�ѳ���װ�䵽�����ϣ�����ʰȡ�ڶ��鳵�����������ǰ�����촰����ʰȡ��Ϳ����װ������ 3����ϰ�Ի����˵��ʾ�̡��������˶��켣ѡ����Ϳ��������ϡ� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
11 |
������������� |
���ܡ��������ص����� |
1�����ļӹ����������ϰڷŵװ�����װ�̶�������̨�� 2������Ҫ�����Ͽ鱻�ڷŵ��ڷŵװ��ϣ�������ͨ�����̼о߰�Ҫ��ʰȡ���Ͽ����������� 3�����Ͽ��г����κ����������֣������߿ɸ�����Ҫѡ��ڷţ��ɸ�����Ҫ�����������������״�� 4����ϰ�Ի�������⡢���е����Ⲣ���ٱ��ʾ�̵�ǿ��ѵ���� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
12 |
ͼ����˲������� |
���ܡ��������ص����� |
1������״���ϰ��ˣ�������ͨ�����̼о����ΰ�һ�����ϰ�ڷźõĶ�����״���ϣ����Ρ�Բ�Ρ�����Ρ������Ρ�����ǣ�ʰȡ���˵���һ�����ϰ��ϣ� 2��Բ�����ϰ��ˣ�������ͨ�����̼о����ΰ�һ�����ϰ�ڷźõ�����ʰȡ���˵���һ�����ϰ��ϣ����ϰ����ƽ�Ź̶�������̨��Ҳ�ɰ�װб��̶��ܰ�װ������̨��Բ�����������֣�һ���������Ǯ�������ϣ�һ�ֵ��������ϣ� 3��ÿ�����ϰ��Ӧ��λ��ʴ�������ϱ�ţ� 4��������ʽ�ɸ���Ҫ�������ϣ���ʽ������������ƽ�桢б�桢���С�ָ�����λ�á��������ϻ�ϵ�Ҫ�� 5��ǿ���Ի����˵�λ��ѵ�������⡣ |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
13 |
������������ |
���ܡ��������ص����� |
1������������ԭʼ����ڴ洢���ڣ����������������ƣ��ڷ�װ�ò��ó��߲��룬��Ϊ�������������̨�й��˴�������ⲣ����ij��ߣ� 2��������ͨ�����̼о�ʰȡ�����嵽���̨��⣬���ݼ���жϲ�������ѡ����뷽������ѭ���� ���̼о�����ʰȡ�������������壻 3��ѵ���Ի������в�ͬ���ѡ��ľ�ȷ��λ�� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
14 |
����� |
���ܡ��������ص����� |
1���������óߴ磺700 mm��350 mm��450mm 2���ڲ��ɷֲ�洢������ÿ���ж������ּ�֧�������ڳIJ��ú����ϣ� 3����Ǻ��ڲ�������ABS���ϣ�ģ��һ�γ��Σ� 4��������֮��ɲ���������������һ�壻 5�������ÿ�����20kg�������������ÿɳ�60kg�������ⲿ�ɳ�130kg�� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
15 |
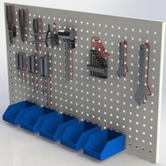
��������ǽ |
���ܡ��������ص����� |
1��2.0mm���ʺ�������������ɣ��̶ܹ���ǽ���ϣ� 2����10�������λ�ã�ÿ��λ�ô��ж���Ŀ�ӻ�������ʶ�� 3�����ڴ�Ÿ��ֹ�����˿��ĸ�����������ֱ�ۣ���ŷ��㣬���ڰ��ˣ�ռ�ÿռ�С���ǹ�������洢���ܵ��������壻 |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
16 |
��ȫ����ϵͳ |
���ܡ��������ص����� |
1�����뻤���������1200mm����ܲ���2mm���ɫ���Ͻ���ϣ�����ȫ����װ10mm�����ֻ���������һ����ţ���������ʽ��ռ��2000��2300mm��2000��2300mm�� 2��ϵͳ����վ��װ��3����ͣ��ť���ֱ�λ�ڲ�������̨��ģ�Ͱ�װ̨�����뻤���ϣ��Ա��������ʹ�ã� 3���ڸ��뻤������ȫ�š��豸������λ��ճ�����ְ�ȫ��ʶ��ʵʱ�����豸�İ�ȫ���С� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�������� |
�� |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
17 |
����ѹ���� |
���ܡ��������ص����� |
������12L |
2�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
18 |
ʹ��˵���� |
���� |
���豸���� |
6�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
19 |
�̲� |
���� |
1�����豸������������ѧ��Ϲ���ҳ1���� 2������Ʒ�ƹ�ҵ�����˻����̲�1���� |
7�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
20 |
������ |
���� |
|
1�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21 |
��Ѷ�� |
���� |
|
1�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
22 |
ְҵ�龰��ѧϵͳ |
���ܡ��������ص����� |
|
1�� |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ͼƬ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
�� |
�� |
�� |
�� |
�� |
�� |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
�ߡ��ɿ������Ҫʵѵ��Ŀ��
1����ҵ�����˵Ļ�����ʶ��
2����ҵ������ʾ�����˶�������
3����ҵ�����˵ĵ�λʾ�̡�
4����ҵ�����˻����������á�
5����ҵ�����˻����˶�ָʾѧϰ��
6����ҵ�����˻���ʾ�����ij���༭��
7����ҵ������IO����Ӧ�á�
8����ҵ�����˻������߷�����
9���켣���б����ʾ�̡�
10��ƽ��Բ����ͼ��������ʾ�̡�
11��ƽ�������ͼ��������ʾ�̡�
12������Բ����ͼ��������ʾ�̡�
13�����������ͼ��������ʾ�̡�
14���̶�λ�ð��˱����ʾ�̡�
15��ƽ��λ�ð���װ������ʾ�� ��
16��б��λ�ð���װ������ʾ�� ��
17��ƽ����������������ʾ�̡�
18��ģ�ͳ���Ϳ��װ������ʾ�̡�
19���������������������еı����ʾ�̡�
20���̶�λ�ð��˱����ʾ�̣�
21������������������еı����ʾ�̣�
22����ҵ��������ץ�ּо������Ӧ�ã�
23����ҵ�����������̼о������Ӧ�ã�